|
Electric Tiger DAQ
1.0.0
Data Acquisition Software for the Electric Tiger Experiment
|
|
Electric Tiger DAQ
1.0.0
Data Acquisition Software for the Electric Tiger Experiment
|
Object to sends commands to an Applied Motion products stepper motor. More...
#include <stepper_motor.h>
Public Member Functions | |
| StepperMotor (std::string ip_addr, uint port_number, QObject *parent=0) | |
| StepperMotor & | operator= (const StepperMotor &)=delete |
| void | TuneToLength (double desired_length, double current_length) |
| void | TuneCavity (double length_of_tune) |
| void | PanicResetCavity (uint iteration, double revs_per_iter) |
| void | TuningLoop (double len_of_tune, double revs, uint iters) |
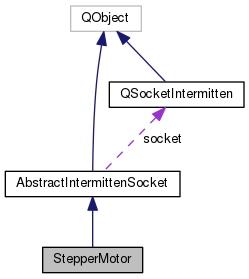
 Public Member Functions inherited from AbstractIntermittenSocket Public Member Functions inherited from AbstractIntermittenSocket | |
| AbstractIntermittenSocket (std::string ip_addr, uint port_number, QObject *parent=0) | |
| AbstractIntermittenSocket (const TCPSocketParam socket_param, QObject *parent=0) | |
| AbstractIntermittenSocket & | operator= (const AbstractIntermittenSocket &)=delete |
Additional Inherited Members | |
| Protected Attributes inherited from AbstractIntermittenSocket | |
| QSocketIntermitten * | socket |
Object to sends commands to an Applied Motion products stepper motor.
 1.8.11
1.8.11

