|
Electric Tiger DAQ
1.0.0
Data Acquisition Software for the Electric Tiger Experiment
|
|
Electric Tiger DAQ
1.0.0
Data Acquisition Software for the Electric Tiger Experiment
|
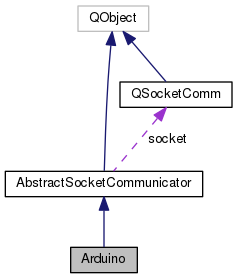
Object to send and receive commands from an Arduino Uno (R3) More...
#include <arduino.h>
Public Member Functions | |
| Arduino (std::string ip_addr, uint port_number, QObject *parent=0) | |
| Arduino & | operator= (const Arduino &)=delete |
| double | GetCavityLength () |
| Get the current cavity length from the Arduino. More... | |
 Public Member Functions inherited from AbstractSocketCommunicator Public Member Functions inherited from AbstractSocketCommunicator | |
| AbstractSocketCommunicator (std::string ip_addr, uint port_number, QObject *parent=0) | |
| AbstractSocketCommunicator (const TCPSocketParam socket_param, QObject *parent=0) | |
| AbstractSocketCommunicator & | operator= (const AbstractSocketCommunicator &)=delete |
Additional Inherited Members | |
| Protected Attributes inherited from AbstractSocketCommunicator | |
| QSocketComm * | socket |
Object to send and receive commands from an Arduino Uno (R3)
Arduino is expected to be equipped with an Ethernet Shield and string potentiometer.
| double Arduino::GetCavityLength | ( | ) |
Get the current cavity length from the Arduino.
This function will poll the Arduino until a non-empty string is returned, guaranteeing that the return value will be valid.
Note that this does not elminate the problem of getting 'doubled' responses, e.g. "7.5\r\n7.5"
 1.8.11
1.8.11

